








Am 31. Oktober 2021 durfte ich während der Ausbildertagung in Bingen mein mittlerweile langjähriges Projekt in einem Vortrag vorstellen. Die Einladung dazu war sicherlich genau so überraschend, wie die äußerst positiven Rückmeldungen seitens des LVST, sowie auch der anwesenden Ausbilder.
Doch gehen wir einen Schritt zurück: Worum geht es überhaupt? Was ist „Bathymetrie“ und welchen Nutzen ergeben sich für die LVST Mitglieder oder Taucher im Allgemeinen?
Was ist Bathymetrie?
Bathymetrie setzt sich aus 2 Wörtern zusammen, die ihren Ursprung im Griechischen finden. Das Wort „bathýs” bedeutet “tief” und “métron” steht für “Maß”. Das etwas sperrige Wort “Bathymetrie” beschreibt also die Vermessung der Unterwasserwelt.
Noch bis ca. 1915 war diese Vermessung sehr aufwendig, da in einem regelmäßigen Abstand ein Gewicht an einem Seil herabgelassen wurde. Dadurch hat sich ein grobes Raster mit den Tiefen ergeben. Anhand dieser konnte man dann von Hand eine Karte mit Tiefenlinien zeichnen. (Fig. 1a)
Heutzutage haben wir jedoch sehr genaue Sonargeräte, die zudem immer erschwinglicher werden. Dadurch lässt sich die Vermessung ein Stück weit automatisieren.(Fig. 1b)
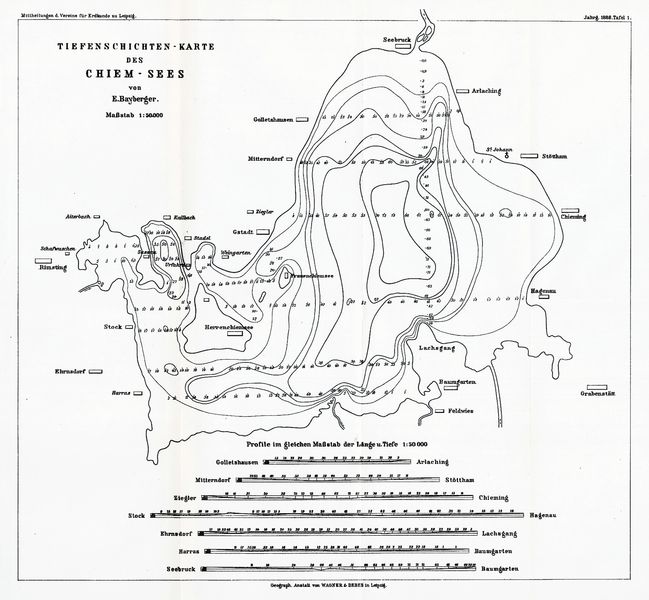 fig1a
fig1a 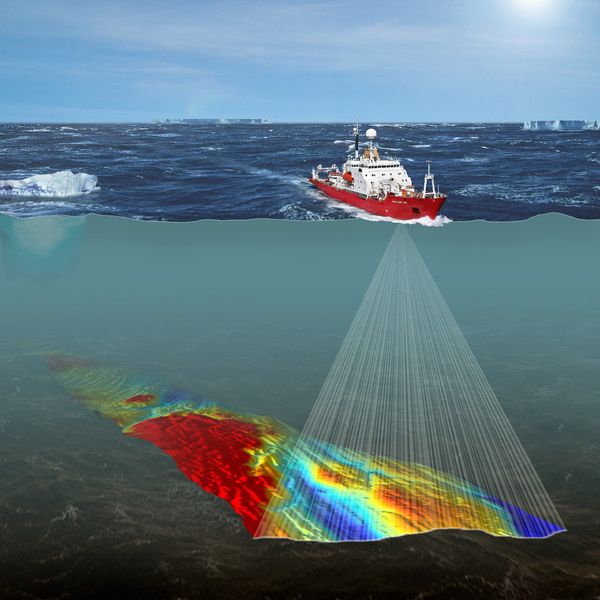 fig1b
fig1b
Eine weitere Möglichkeit nutzen Taucher weltweit bereits seit es den Tauchsport gibt. Man notiert die Tiefe und Richtung markanter Stellen und zeichnet über Wasser eine Karte aus dem Gedächtnis.
Nahezu jeder Taucher kennt die Karten, die der Diveguide auf dem Safarischiff liebevoll auf ein Whiteboard zeichnet. Manche Tauchplatzkarten könnte man danach glatt als Kunstwerk verkaufen.
Wir beim STC-Nautilus Neustadt e.V. versuchen uns auch des Öfteren daran. Bisher jedoch mit eher mittelmäßigem Erfolg.(Fig 2a)
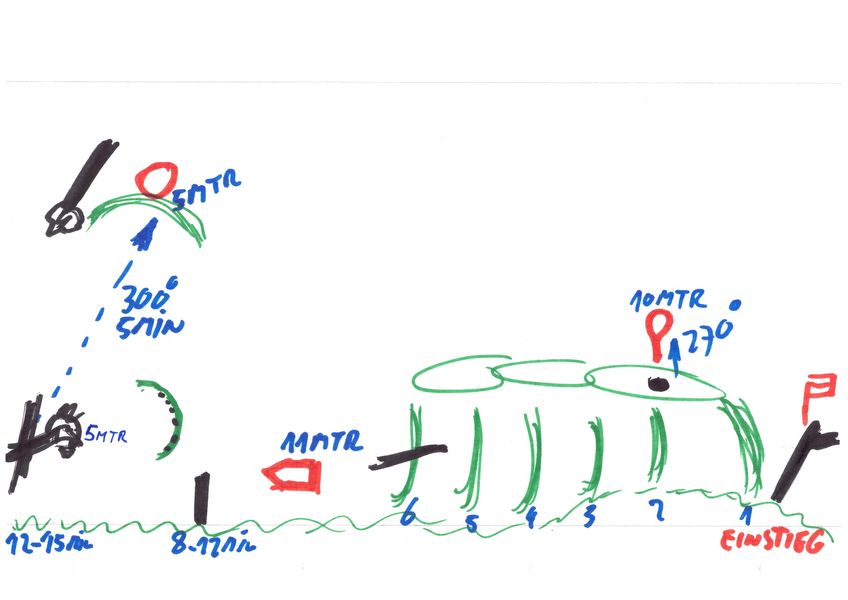 fig2
fig2
Projekt Vorstellung:
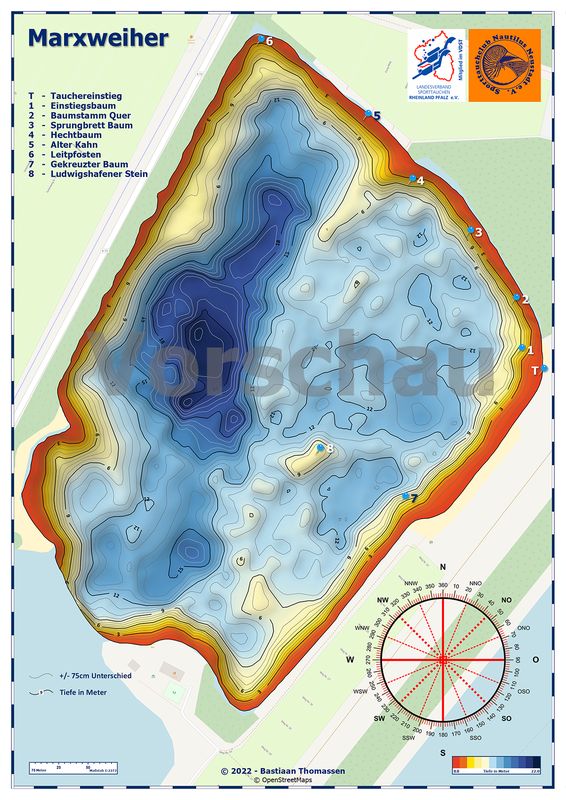
Im Mai 2019 habe ich beschlossen, dass ich eine Tiefenkarte vom gesamten Marxweiher erstellen möchte. Eine, die auf Fakten statt künstlerischer Freiheit basiert und zudem auch Bereiche einschließt, an denen selten getaucht wird. In 2019 war die Lösung noch ein aufblasbares Ruderboot und ein eher rudimentäres Sonargerät.
Nach ca. 22km kreuz und quer über den Marxweiher fahren (Fig. 3) war die Vermessung des Marxweihers erledigt. Nun mussten die Daten in eine spezial Software eingelesen, korrigiert und bearbeitet werden. Dabei entstand nach ca. 40 Stunden Arbeit die erste Tiefenkarte des Marxweihers.
 fig3 1
fig3 1
Jedoch hatte ich auch genug vom Kanufahren. Als grundsätzlich fauler Mensch wollte ich die Vermessung weiter automatisieren, weshalb ich in den 2 Jahren danach ein autonomes Boot gebaut habe, welches GPS gesteuert automatisch einen See vermessen kann.
Nach ca. einem Jahr der Planungsphase, in der Auftrieb, Größe, Antrieb, Stromverbrauch etc. ermittelt werden (Fig. 4) beginnt im Sommer 2020 der Bau des ca. 90cm langen Katamarans.
Die Schwimmkörper bestehen aus handelsüblichen Kanalrohren (HT-Rohr) die zusammengesteckt werden. Auf diesem Schwimmkörper ist eine spritzwassergeschützte Kiste befestigt, in der sich Antrieb und „Gehirn“ des Bootes befinden. Unter dem Boot befinden sich 2 Strahlruder, die für eine hohe Manövrierbarkeit sorgen. Das „Gehirn“ des autonomen Bootes ist ein kleiner Autopilot-Computer der mit der Opensource-Software „Ardurover“ läuft. Diese Software, wie auch einige weitere Komponenten müssen immer wieder umprogrammiert werden, um das Verhalten des Bootes zu optimieren.
Im Oktober 2020 findet auf einem kleinen Teich dann der erfolgreiche Stapellauf des Bootes statt, gefolgt von einigen Testfahrten auf dem Marxweiher. Erst auf dem weitaus größeren Marxweiher werden einige Probleme bei der Manövrierbarkeit und Funkreichweite ersichtlich.
Diese Kinderkrankheiten habe ich dann über den Winter 2020/2021 optimiert, was letzten Endes viel Computerarbeit und Programmierung bedeutet. (Fig. 5a & 5b)
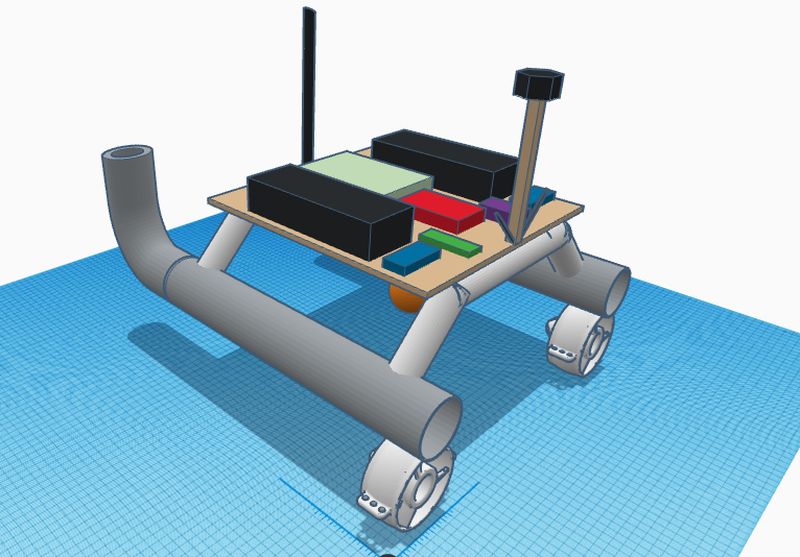 fig4 1
fig4 1
 fig5a
fig5a  fig5b
fig5b
Stand Heute
Nach insgesamt 1,5 Jahren, geprägt durch vielen Testfahrten und einigen Rückschlägen (Antriebsdefekt auf dem Marxweiher → 2 neue Motoren. Später ein manövrierunfähiges Boot, welches über Nacht zurück gelassen werden musste), ist das Boot nun fertig gestellt.
Im August 2021 wird das Boot mit einem modernen Sidescan Sonar(Fig. 7) ausgestattet, das eine weitaus genauere Vermessung ermöglicht. Seit September kann das Boot mit einer Funkreichweite von ca. 1 km nahezu jeden See im Umkreis problemlos vermessen.
Aktuell hat das Boot eine Akkukapazität, die für ca. 4km/90Minuten ausreicht. Da ich insgesamt 4 der benötigten Akkus besitze, können so am Tag bis zu 8 km in knapp 3 Stunden abgefahren und gescannt werden. Mit anderen Worten: Je nach gewünschter Auflösung der Karte dauert es ca. 4-5 Tage, um z.B. den Marxweiher zu kartieren.
In Zukunft hoffe ich dies noch verbessern zu können, indem ich den Wasserwiderstand optimiere und den Stromverbrauch minimiere.
Nach ca. 2 Jahren bin ich nun dort wo ich sein wollte: Ich kann mich gemütlich zurücklehnen, während der See automatisch vermessen wird.(Fig. 6)
 fig6
fig6 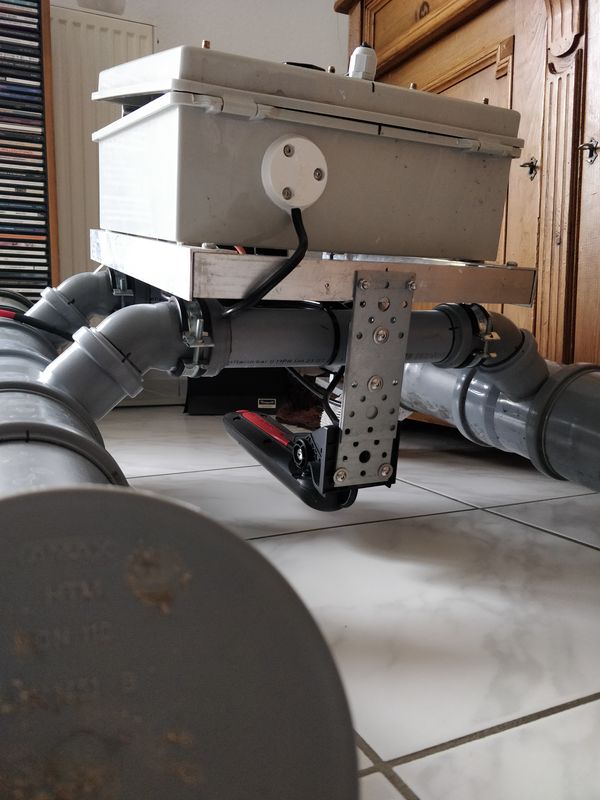 fig7
fig7
Doch wozu der Aufwand?
Was anfangs eine „Schnapsidee“ war, die aus Neugier nach der Unterwasserlandschaft entstanden ist, zeigt sich nun als äußerst nützlich. Im STC-Nautilus nutzen wir bereits seit 2019 die Unterwasser-Karten, die aus diesem Projekt entstanden sind. Dabei hat sich gezeigt, dass die Anfänger bereits während der Ausbildung ein besseres Verständnis für Zeit und Raum beim Tauchen entwickeln. Beim Briefing lässt sich leichter erklären, wo genau wir uns während des Tauchgangs befinden werden.
Erfahrene Taucher entwickeln durch die Nutzung der Karte mit der Zeit eine eigene Karte im Kopf, wodurch sie zielsicher - auch bei schlechter Sicht- navigieren. Jedoch kann nicht jeder sich topografische Gegebenheiten gut bildlich vorstellen. Die Karte hilft hierbei.
Nicht selten stehen unsere Taucher beim Debriefing mit der Karte in der Hand am See und „fachsimpeln“ wo sie wohl waren und wo sie das nächste Mal hin gehen möchten.
Über die Zeit haben unsere Mitglieder im Marxweiher andere Tauchrouten, als die typischen „Links herum“ oder „rechts herum“ Tauchgänge, entwickelt. Denn die Karte lädt zum Entdecken ein.
Welche Karten gibt es und kann man diese nutzen?
Bereits 2019 habe ich mit dem Kanu eine Tiefenkarte vom Marxweiher erstellt, die ich nun dem LVST und damit allen Tauchern im Verbandsgebiet zur Verfügung stellen möchte.
Dank einer starken Rückendeckung des LVST wird es mir möglich sein im Laufe des Jahres 2022 den Marxweiher erneut mit dem weitaus besseren Sonar zu vermessen. Hoffentlich entsteht dadurch eine noch genauere Karte mit einer höheren Auflösung.
Weiterhin steht auf dem Plan um in 2022 den Jägerweiher zu vermessen und auch diese Karte dem LVST zur Verfügung zu stellen.
Ich hoffe, dass meine Karte(n) gut aufgenommen werden und einigen Tauchern bei der Navigation und Planung ihrer Tauchgänge helfen können.
3 kleine Tipps möchte ich euch an die Hand geben:
- Es lohnt sich die Karte in DinA4 zu Laminieren.
- Mit Hilfe der „Parallel-Verschiebung“ kann man Kurse auf der Karte bestimmen.
- Ich habe euch Bereits einige Punkte markiert. Die Liste kann jeder für sich vervollständigen.
Bastiaan Thomassen
Hier der Link zum hochauflösenden Download
Bildquellen:
Fig 1A digital.slub-dresden.de/fileadmin/data/33869783Z/33869783Z_tif/jpegs/00000141.tif.large.jpg
Fig 1B www.bas.ac.uk/media-post/new-antarctic-seabed-sonar-images-reveal-clues-to-sea-level-rise/
Alle anderen: Bastiaan Thomassen